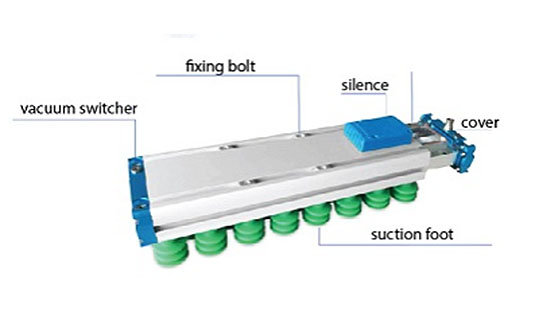
吸盤足
吸盤は、ワークピースと真空システムを接続する部品です。選択された吸盤の特性は、真空システム全体の機能に根本的な影響を与えます。
真空吸引器の基本原理
1.ワークはどのようにして吸盤に吸着されるのですか?
真空システムの環境と比較すると、吸盤とワークピースの間には低圧領域(真空)が存在します。
圧力差により、ワークピースは吸盤に逆押しされます。
Δp = p1 – p2 です。
力は圧力差と有効面積に比例し、F ~ Δ pandF ~ A à F = Δ px A となります。
2. 真空カップの重要な特徴
内容積: 排気される吸引カップの内容積は、ポンピング時間に直接影響します。
小さな曲率半径: 吸盤で掴むことができるワークの小さな半径。
シーリングリップのストローク:吸盤が真空引きされた後の圧縮距離を指します。シーリングリップの相対的な動きに直接影響します。
吸盤のストローク:吸盤をポンピングしたときの持ち上げ効果。
吸盤の分類
一般的に使用される吸盤には、平らな吸盤、波形の吸盤、楕円形の吸盤、特殊な吸盤などがあります。
1. フラット吸盤:高い位置決め精度。小型設計と小さな内部容積により、把持時間を最小限に抑えることができます。高い横方向力を実現。ワークの平面上で、広いシーリングリップは優れたシール特性を有します。ワークを把持する際の安定性に優れています。大口径吸盤の埋め込み構造により高い吸引力を実現できます(例えば、ディスク型構造吸盤)。底部支持。大きく有効な吸盤径。吸盤材料は多種多様です。可変周波数吸盤の典型的な応用分野:金属板、段ボール箱、ガラス板、プラスチック部品、木板など、表面が平坦またはわずかに粗い、平らまたはわずかに皿状のワークの取り扱い。
2. 波形吸盤の特徴:1.5倍、2.5倍、3.5倍の波形があります。凹凸面への適応性に優れています。ワークを掴む際に持ち上げ効果があります。高さの調整が可能で、傷つきやすいワークを優しく掴みます。底部は柔らかいリップル加工が施されています。吸盤のハンドルと上部リップルは高硬度です。柔らかく、柔軟性のある円錐状のシーリングリップです。底部サポートがあります。吸盤の材質は多種多様です。波形吸盤の代表的な用途分野:自動車の金属板、カートン、プラスチック部品、アルミホイル/熱可塑性樹脂包装製品、電子部品など、皿状で凹凸のあるワークのハンドリング。
3. 楕円形吸盤:吸着面を有効活用。長尺凸型ワークに適しています。硬度を高めた真空吸着。小型で吸引力が大きい。平型吸盤や波形吸盤と共通。様々な材質の吸盤に対応。埋め込み構造により高い把持力(ディスク型吸盤)。楕円形吸盤の代表的な用途:細くて小さなワークのハンドリング:配管継手、幾何学的形状のワーク、木片、窓枠、段ボール、スズ箔/熱可塑性包装製品など。
4. 特殊吸盤:通常の吸盤と同様に汎用性があります。吸盤の材質と形状の特殊性により、特定の用途分野/企業に適用できます。特殊吸盤の代表的な用途:特殊な性能を持つワークピースのハンドリング。例えば、脆い、多孔質、変形しやすい表面構造などです。


投稿日時: 2023年4月7日